ūÍđĪŌĩŧúÆũČËĀī―ēĢŽROSÓÐŌŧļöĩĨķĀĩÄ·ÖÖ§ĢŽšÜķāČËķžĖáĩ―ÁËĢŽ―ÐŨöROS-Industrial ĢĻROS-IĢĐĄĢROSŨũΊÖð―ĨÁũÐÐĩÄČížþŋōžÜĢŽĩąČŧēŧŧá·ÅđýđĪŌĩŧúÆũČËÕâļöÅÓīóķøģÉĘėĩÄĘÐģĄĢŽËųŌÔROS-IģöÏÖĩÄÄŋĩÄūÍĘĮÏĢÍû―ŦROSļģÄÜÓÚđĪŌĩŧúÆũČËĢŽÔÚ―âūöžæČÝÐÔÎĘĖâĩÄŧųīĄÉÏĢŽÍØÕđļüķāīđÖąÐÐŌĩĩÄĩäÐÍÓĶÓÃĄĢg0fŋėģäÍøÂį
ÃŋīÎ―ēĩ―ROS-IĢŽÎŌķžŧáÕđĘūÕâļöÓÐČĪĩÄŅÝĘūĘÓÆĩĢšg0fŋėģäÍøÂį
Five Robots Make Your Personal
ĘÓÆĩÖÐĩÄÎåŋîŧúÆũČËŨéģÉŌŧļöČáÐÔÉúēúÏßĢŽŋÉŌÔΊŋÍŧ§ĖáđĐķĻÖÆŧŊĩÄŌûÁÏ·þÎņĄĢļöČËČÏΊĢŽROSļģÄÜđĪŌĩŧúÆũČËūÍĘĮŌŠ―âūöĀāËÆÕâŅųĩÄ“ŧúÆũČË+”ÐÍĩÄÎĘĖâ ĢŽ·ņÔōÍĢÁôÔÚīŦÍģĘĐ―Ė―ŨķÎūÍÃŧĘēÃīŌâŌåÁËĄĢg0fŋėģäÍøÂį
<img src="https://pic1.zhimg.com/50/v2-6c549b997042122df0c25827576e7cb5_hd.jpg" data-rawwidth="467" data-rawheight="219" data-size="normal" data-caption="" data-default-watermark-src="https://pic2.zhimg.com/50/v2-7f1e9c33b27c80837865430de1afec9f_hd.jpg" class="origin_image zh-lightbox-thumb" width="467" data-original="https://pic1.zhimg.com/v2-6c549b997042122df0c25827576e7cb5_r.jpg"/> ROS-IĩÄļÅÄîĘĮ2011ÄęÓÉ Southwest Research Institute (SwRI)ĄĒWillow GaragešÍYaskawa-Motoman RoboticsŌŧÆðĖáģöĀīĩÄĢŽÍÆđãĩÄËŲķČēĒēŧËãŋėĢŽĩŦŌēČĄĩÃÁËēŧÉŲÓĶÓÃģÉđûĢŽŋÉŌÔēÎŋž2017ÄęĩŨROS-IđŲ·―·ĒēžĩÄÎåÖÜÄęĘÓÆĩĄĢg0fŋėģäÍøÂį
ĘÓÆĩÖÐēŧ·ĶËÄīóžŌŨåÖÐĩÄŧúÆũČËĢŽÕâÐĐķžĘĮROSÔÚđĪŌĩŧúÆũČËÉÏĩÄÓĶÓÃĄĢg0fŋėģäÍøÂį
ËäČŧROS-IÕëķÔđĪŌĩŧúÆũČËķĻŌåÁËŌŧĖŨÍĻÓÃÐŌé——simple_message ĢŽĩŦĘĮķÔļũÆ·ÅÆŧúÆũČËĩÄÖ§ģÖēĒēŧĘĮŌŧžþžōĩĨĩÄĘÂĮéĢŽÐčŌŠŧúÆũČËģ§žŌĖáđĐÖ§ģÖROS-IĩÄ―ÓŋÚĢŽĩŦĘĮļüīóĩÄĀ§ÄŅÓĶļÃĘĮžžĘõÖŪÍâĩÄĄĢg0fŋėģäÍøÂį
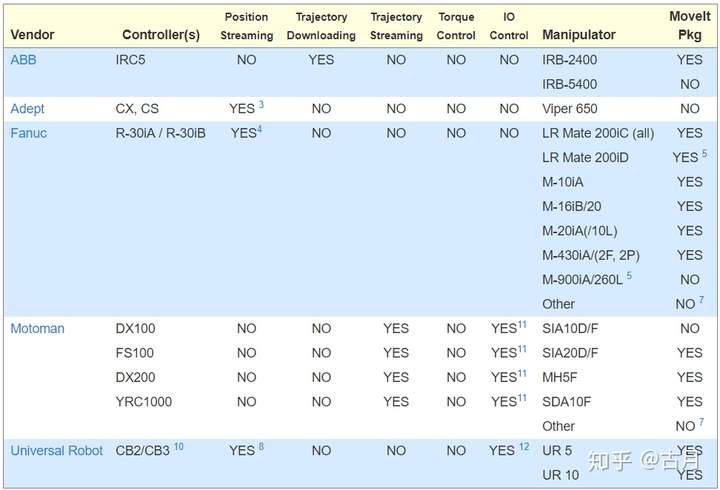
ÄŋĮ°žļīóģ§žŌĩÄÖ§ģÖĮéŋöČįÏÂĢĻēÎŋžĢšIndustrial/supported_hardware - ROS Wiki ĢĐĢšg0fŋėģäÍøÂį
<img src="https://pic3.zhimg.com/50/v2-a9e0850e22b45f9e3288197d2d39233a_hd.jpg" data-rawwidth="972" data-rawheight="662" data-size="normal" data-caption="" data-default-watermark-src="https://pic1.zhimg.com/50/v2-cde302a43579034ab95c46c762f43168_hd.jpg" class="origin_image zh-lightbox-thumb" width="972" data-original="https://pic3.zhimg.com/v2-a9e0850e22b45f9e3288197d2d39233a_r.jpg"/> đØÓÚROSĩÄŋÉÓÃÐÔīæÔÚšÜķāÕųŌéĢŽļöČËČÏΊĢšÕâĘĮŌŧļöÔõÃīÓÃĩÄÎĘĖâĢŽÄÃĀīÖũŌåŋÏķĻĘĮÐÐēŧÍĻĩÄĢŽÕæÕýÕŌĩ―ÎĘĖâËųÔÚēĒ―ášÏÐčĮó―âūöÎĘĖâēÅĘĮŋÉÓÃÐÔĩÄđØžüĄĢ g0fŋėģäÍøÂį
ÔŲūŲžļļöĩäÐÍĩÄÓĶÓðļĀýĢšg0fŋėģäÍøÂį
ŧúÆũČËŋØÖÆÆũÖÐĩÄīóĀÐČËÎï——KEBAĢŽËûÃĮĩÄŋØÖÆÆũŌŅūÖ§ģÖROSĢš
<img src="https://pic2.zhimg.com/50/v2-2a5a9092f9ad859ddfd0cbcc77e88a3b_hd.jpg" data-rawwidth="1117" data-rawheight="669" data-size="normal" data-caption="" data-default-watermark-src="https://pic3.zhimg.com/50/v2-00143bce7a73cf0dde5cf0dddf24eeb6_hd.jpg" class="origin_image zh-lightbox-thumb" width="1117" data-original="https://pic2.zhimg.com/v2-2a5a9092f9ad859ddfd0cbcc77e88a3b_r.jpg"/> 2. ÃĀđúNASAŧųÓÚROSŋŠ·ĒĩÄRobonaut 2ŌŅūÔÚđúžĘŋÕžäÕūĀïļÉŧîÁËĢšg0fŋėģäÍøÂį
<img src="https://pic1.zhimg.com/50/v2-936a7eec6cfc591fdf62192c9a0886f6_hd.jpg" data-rawwidth="390" data-rawheight="259" data-size="normal" data-caption="" data-default-watermark-src="https://pic3.zhimg.com/50/v2-c04351972f51c80344a3eb9a02015f17_hd.jpg" class="content_image" width="390"/> 3. °ŲķČapolloÎÞČËģĩĩÄĩŨēãĘĮŧųÓÚROSŋŠ·ĒĩÄĢŽēîĩãļÄģÉÁËROS 2ĢŽŋÉŌÔÔÚgithubÉÏÕŌĩ―ĢĻapollo-platform ĢĐĢš g0fŋėģäÍøÂį
<img src="https://pic3.zhimg.com/50/v2-8c506edd6045e607c311d66263b414b2_hd.jpg" data-rawwidth="438" data-rawheight="292" data-size="normal" data-caption="" data-default-watermark-src="https://pic4.zhimg.com/50/v2-1d3c81970ae48f67bbde740e814c7c8b_hd.jpg" class="origin_image zh-lightbox-thumb" width="438" data-original="https://pic3.zhimg.com/v2-8c506edd6045e607c311d66263b414b2_r.jpg"/> 4. ROS-IŨî―üÕýŨžąļšÍÎĒČíĄĒąĶÂíšÏŨũĢŽŋŠ·ĒŌŧĖŨŨÔķŊŧŊ―âūö·―°ļĢĻēÎŋžĢšA ROS-Industrial Collaboration with Microsoft and BMW ĢĐĢšg0fŋėģäÍøÂį
<img src="https://pic1.zhimg.com/50/v2-46db04fe3338c8e247e5397b4d398e08_hd.jpg" data-rawwidth="657" data-rawheight="367" data-size="normal" data-caption="" data-default-watermark-src="https://pic3.zhimg.com/50/v2-068ac3df75af330bdeeceb166e20abaa_hd.jpg" class="origin_image zh-lightbox-thumb" width="657" data-original="https://pic1.zhimg.com/v2-46db04fe3338c8e247e5397b4d398e08_r.jpg"/> ŨîšóĢŽÔŲ―éÉÜŌŧļöąūČËĮŨŨÔļšÔðŅзĒĩÄđĪŌĩŧúÆũČËŋØÖÆÏĩÍģĢšg0fŋėģäÍøÂį
đĶ·ōĘÖĢšŌŧŋîŧųÓÚROSĩÄđĪŌĩŧúÆũČË
mp.weixin.qq.comÍŽŅųĘĮŧųÓÚROSŋŠ·ĒĢŽŌŅūŋÉŌÔÔÚđĪģ§ĖæīúđĪČËĀÍķŊĀēĢšg0fŋėģäÍøÂį
g0fŋėģäÍøÂį