importtaichiastiquality=1# Use a larger value for higher-res simulationsn_particles,n_grid=9000*quality**2,128*qualitydx,inv_dx=1/n_grid,float(n_grid)dt=1e-4/qualityp_vol,p_rho=(dx*0.5)**2,1p_mass=p_vol*p_rhoE,nu=0.1e4,0.2# Young's modulus and Poisson's ratiomu_0,lambda_0=E/(2*(1+nu)),E*nu/((1+nu)*(1-2*nu))# Lame parametersx=ti.Vector(2,dt=ti.f32,shape=n_particles)# positionv=ti.Vector(2,dt=ti.f32,shape=n_particles)# velocityC=ti.Matrix(2,2,dt=ti.f32,shape=n_particles)# affine velocity fieldF=ti.Matrix(2,2,dt=ti.f32,shape=n_particles)# deformation gradientmaterial=ti.var(dt=ti.i32,shape=n_particles)# material idJp=ti.var(dt=ti.f32,shape=n_particles)# plastic deformationgrid_v=ti.Vector(2,dt=ti.f32,shape=(n_grid,n_grid))# grid node momemtum/velocitygrid_m=ti.var(dt=ti.f32,shape=(n_grid,n_grid))# grid node massti.cfg.arch=ti.cuda# Try to run on GPU@ti.kerneldefsubstep():fori,jinti.ndrange(n_grid,n_grid):grid_v[i,j]=[0,0]grid_m[i,j]=0forpinrange(n_particles):# Particle state update and scatter to grid (P2G)base=(x[p]*inv_dx-0.5).cast(int)fx=x[p]*inv_dx-base.cast(float)# Quadratic kernels [http://mpm.graphics Eqn. 123, with x=fx, fx-1,fx-2]w=[0.5*ti.sqr(1.5-fx),0.75-ti.sqr(fx-1),0.5*ti.sqr(fx-0.5)]F[p]=(ti.Matrix.identity(ti.f32,2)+dt*C[p])@F[p]# deformation gradient updateh=ti.exp(10*(1.0-Jp[p]))# Hardening coefficient: snow gets harder when compressedifmaterial[p]==1:# jelly, make it softerh=0.3mu,la=mu_0*h,lambda_0*hifmaterial[p]==0:# liquidmu=0.0U,sig,V=ti.svd(F[p])J=1.0fordinti.static(range(2)):new_sig=sig[d,d]ifmaterial[p]==2:# Snownew_sig=min(max(sig[d,d],1-2.5e-2),1+4.5e-3)# PlasticityJp[p]*=sig[d,d]/new_sigsig[d,d]=new_sigJ*=new_sigifmaterial[p]==0:# Reset deformation gradient to avoid numerical instabilityF[p]=ti.Matrix.identity(ti.f32,2)*ti.sqrt(J)elifmaterial[p]==2:F[p]=U@sig@V.T()# Reconstruct elastic deformation gradient after plasticitystress=2*mu*(F[p]-U@V.T())@F[p].T()+ti.Matrix.identity(ti.f32,2)*la*J*(J-1)stress=(-dt*p_vol*4*inv_dx*inv_dx)*stressaffine=stress+p_mass*C[p]fori,jinti.static(ti.ndrange(3,3)):# Loop over 3x3 grid node neighborhoodoffset=ti.Vector([i,j])dpos=(offset.cast(float)-fx)*dxweight=w[i][0]*w[j][1]grid_v[base+offset]+=weight*(p_mass*v[p]+affine@dpos)grid_m[base+offset]+=weight*p_massfori,jinti.ndrange(n_grid,n_grid):ifgrid_m[i,j]>0:# No need for epsilon heregrid_v[i,j]=(1/grid_m[i,j])*grid_v[i,j]# Momentum to velocitygrid_v[i,j][1]-=dt*50# gravityifi<3andgrid_v[i,j][0]<0:grid_v[i,j][0]=0# Boundary conditionsifi>n_grid-3andgrid_v[i,j][0]>0:grid_v[i,j][0]=0ifj<3andgrid_v[i,j][1]<0:grid_v[i,j][1]=0ifj>n_grid-3andgrid_v[i,j][1]>0:grid_v[i,j][1]=0forpinrange(n_particles):# grid to particle (G2P)base=(x[p]*inv_dx-0.5).cast(int)fx=x[p]*inv_dx-base.cast(float)w=[0.5*ti.sqr(1.5-fx),0.75-ti.sqr(fx-1.0),0.5*ti.sqr(fx-0.5)]new_v=ti.Vector.zero(ti.f32,2)new_C=ti.Matrix.zero(ti.f32,2,2)fori,jinti.static(ti.ndrange(3,3)):# loop over 3x3 grid node neighborhooddpos=ti.Vector([i,j]).cast(float)-fxg_v=grid_v[base+ti.Vector([i,j])]weight=w[i][0]*w[j][1]new_v+=weight*g_vnew_C+=4*inv_dx*weight*ti.outer_product(g_v,dpos)v[p],C[p]=new_v,new_Cx[p]+=dt*v[p]# advectionimportrandomgroup_size=n_particles//3foriinrange(n_particles):x[i]=[random.random()*0.2+0.3+0.10*(i//group_size),random.random()*0.2+0.05+0.32*(i//group_size)]material[i]=i//group_size# 0: fluid 1: jelly 2: snowv[i]=[0,0]F[i]=[[1,0],[0,1]]Jp[i]=1importnumpyasnpgui=ti.GUI("Taichi MLS-MPM-99",res=512,background_color=0x112F41)forframeinrange(20000):forsinrange(int(2e-3//dt)):substep()colors=np.array([0x068587,0xED553B,0xEEEEF0],dtype=np.uint32)gui.circles(x.to_numpy(),radius=1.5,color=colors[material.to_numpy()])gui.show()# Change to gui.show(f'{frame:06d}.png') to write images to disk
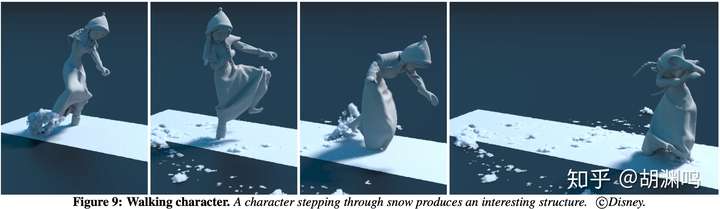
Material Point Method (MPM����һ��ģ���������ʵķ��������类Sulsky������1995�귢��[Application of a particle-in-cell method to solid mechanics]�������ڼ�����ͬʱʹ����Lagrangian particle��Eulerian grid���������ൽHybrid Lagrangian-Eulerian Simulation Method���������������ݵ�Particle-in-Cell (PIC, The particle-in-cell method for numerical solution of problems in fluid dynamics, 1963) ��Fluid Implicit Particles (FLIP, A method for adaptively zoned, particle-in-cell calculations of fluid flows in two dimensions��1986)����Ϥ����Ԫ��ͬѧ����MPM�����grid nodes��Ӧ��FEM�����DOFs, ��MPM�����particles��Ӧ��FEM�����quadrature points����FEM��ʹ����ʽ�������Բ�ͬ����Ϊһ��Element-Free Galerkin��EFG������MPM���沢û����ʽ��Elements��Lagrangian grid��ֻ���ܹ������ƶ���������Ϊquadrature points������������ʹ�����dz��ʺϴ������α䣬���䱳������������Զ���ײ�������������ϡ�������ɢ������weak form����ʹ��MPM��physical accuracy���˱�֤��Lbo�������
2017�������٣����ڱ�Ϧ�����Ǵ�ѧvisit����ʦ�����������һ�����㷨��Moving Least Squares MPM (MLS-MPM)��MLS-MPM�������ܱ�֮ǰ��state of the art�����������Ҵ�����˺ܶ࣬�dz�����ʵ�֡�Ϊ�˼������ǵ�ʵ�飬��MPM�ܵĿ�һ�㣬�һ��˵�ʱ����дSIMD intrinsics������������6��������������ϣ�MLS-MPM���㷨�ϵĸĽ����ܽ�һ��������������ܡ�Lbo�������
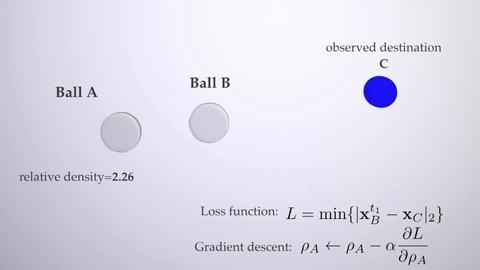
�ڷѳ�һ���������ɵ����ϣ����Ǽ������ߣ�Yu Fang, Ziheng Ge, Ziyin Qu�������ڽ���ʦ��ʵ���ң�����һϵ�����ۣ���ͻ�����룺��ȻAPIC��affine velocity field��MPM�����deformation gradient update��Ҫ�Ķ���velocity gradients�����ܲ�����moving least squaresͳһ������ɢ�����ҿ��ٵ�ʵ����һ�£�����ȷʵ���У������������������ɢ���������Ƿ���ԭ����MPM�ľ��ȣ�������������ȥ���˶��вͣ�һ·��һֱ������������⡣�Ա��˷�����������һֱ�������賿3�㣬��ʱ���Ѿ����ò����ˣ�ֻ�ǵý���ʦͻȻ�˷ܵ�˵��һ��“weak form�Ƴ����ˣ��㷨��weak-form consistent�ģ�” �ҿ���һ�۽���ʦ�ݸ�ֽ�ϵ��Ƶ���ƽ��ÿ��������3�����±�(\alpha, \beta, i, j, k���»��ߣ�˫�»��ߣ��ȵ�)���ƶ��Ƕ���ֻ֪���������Ųݸ壬�㷨��������ȷ���������˱�֤�������һ����������ʱ���Ū������ʦ�������Ƴ����Ĺ�ʽ��������ʦ���пƴ�������ҵ��ֻ���Ҵ������꣬ȴ�Ѿ�����һ��������ˡ����֮������ʱ��û��ʼ��PhD...��Lbo�������
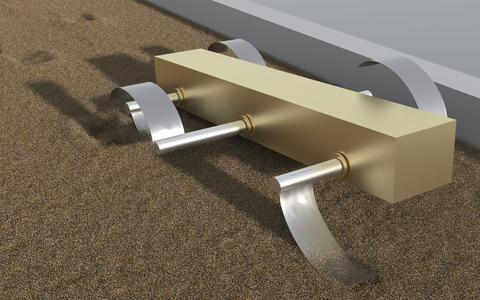
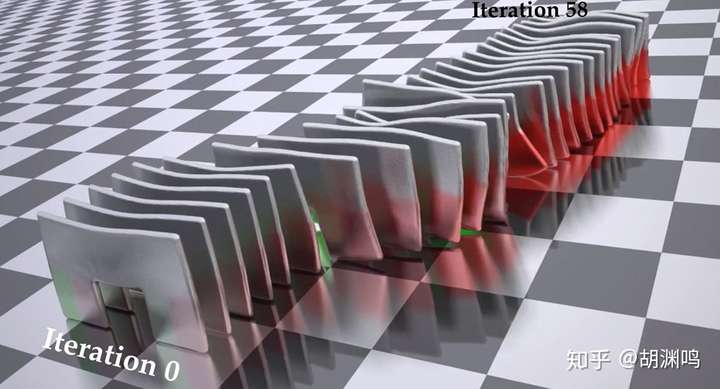
�ڴ��ڼ�����һ��ֵ��һ��Ĺ����Ǻ�Dartmouth College���첩������UWisconsin-Madison��Haixiang Liu��Eftychios Sifakis����Giga-Voxel topology optimization��1,040,875,347�����ص������Ż�����������ƪ���·�����SIGGRAPH Asia 2018�����dzɹ�֤����ͨ��end-to-end codesign������solver��ʹ��һ̨�����ܹ�����100̨������Ч��������������һ����Ŀ���Ҵ��첩��Eftychios����Haixiang����ѧ���ܶࡣ�����еĹ���ֵ���пյ�ʱ��дһƪ���£�����Ͳ���˵�ˡ�Lbo�������
��������ԭ���ҵ�Ph.D.��һ�����˵�����ж���죬�������Ƿ���6ƪpaper����“һ���ڷ�����ACM Transactions on Graphics������”���ָ���ϣ��Ҹо����ܺ�����ˢ���Լ��ļ�¼�ˡ�“��Ȼ�Ѿ������㹻��SIGGRAPH������Ҫ��������������Ҳû��̫���ҵѹ����������ʣ������ʱ��Ϳ�������������������������飬����˵���������������������” ����ô�롣Lbo�������
����˵�������ͼ��ѧ���㷨�����C++ʵ�֡�һЩ����Ĵ��������˱���һ��Ҫһ����Сʱ����������ڴ���ʹ��templates (����2D/3D simulator��templateһ��д���ٶ�float/doubleʵ����)��������ͬѧ����ʾ���ַdz����ѣ��ܶ�ʱ����Ҫdebug compilation����ΪC++ģ���compilation error̫�Ѷ��ˡ�������ͬѧ��ʾ“ͨ��������dzɹ���һ��”��������ͬ����һ��ͬѧ�����ܱ�ҵ��ʱ���Ѿ�����C++���֣�����“TMP“�� ”SFINAE”���������ҪC++17���ܱ��룬�����ʱ��compiler�۵��У���������g++ out of memory�ȵȡ�������ͬѧ��Ҫ����Ҫ����modern C++����over design����ĥ��������ʽ��֪ʶ�̳У�����ԱȽϵ�Ч�ġ�Lbo�������
�Ҿ�������ֹ�һ��MPM����⣬��һ����һ̨“ֻ”��32GB�ڴ�Ļ����Ͽ�4���̱߳��롣���ڸ���һ���ײ��header������Ҫһ��Сʱ���ܱ����꣬�Ҿ�����ȥ���緹�ˡ�ȥ¥���ж��ͳ����Ű��죬���˸�$7�������ϵ�lamb over rice��ij��“����ǽ���”�����������ʵ�����Ѿ���һ��Сʱ�Ժ��ˡ��ұ���Ϊ����Ӧ�ñ�����˿��������ˣ����������Ļ����һ���������Ǿ�ɥ�ģ�������20���ӵ�ʱ����out of memory�ˣ�ֻ�ð�memory swap��hard disk������OS�Ѿ�����û�������ˡ�����һ������Ľ�ѵ��Ҫ�����Ƿݴ����ʱ�������ֻ��32GB���ڴ棬����ֻ�ҿ�3���̱߳��룬��ʹCPU��8��cores��Lbo�������
Ϊ�˽�������ͼ��ѧ�о������ܵ����Լ����������µ����⣬�Ҿ���������Ʊ�����ԡ�����һ���ľ�������Ϊ��Ȼ��֮ǰ���˺ܶ�ʱ����low-level performance engineering������������д���������һ���û�ɹ�����2019��1������һֱ����Taichi programming language (����dz���л�����ڵ���λ�ϰ�Fredo��Bill��������������) ��������������SIGGRAPH Asia 2019�ϡ�Lbo�������
�����Ŀ��������ͦenjoyable�ģ�����ѧ���˲����¶�����һ��ʼ�������Ŀ��ʱ��ջ��飬�µ��黹û�е����ã��Ҿ�work from home��һ���¡��һ��ǵ���һ����ȥ��һ���й�������Ժ������ڼ�д����5��û���ţ����ʵ���ܲ���û��˵��ȥʵ������ͬѧ���죬ѧ��躸綼˵������“��Ģ��”�ˡ�Lbo�������
Comments about Video: The video would be a great place to provide an overview and a big picture of the entire framework, and could also help the reader understand details that were not adequately explained in the paper. Unfortunately, this was not done, the video is extremely short, and only shows some examples.
��Ȼȱ��Ҳ����û�У�����˵Taichi“��������”�Ժ�����һЩ���ƣ������������parsable by the Python parser����Ȼ�����ò���AST���������Щʱ�����ܻ��ܵ�Python�����ƣ����������Ϊ�����ԡ���̬���͡�lexically scoped��Taichi���Ժ�Python������һ����𣬿��ܻ��ϰ����Python˼ά��ʽ�����û�һ������ʹ��һЩbug���Ա����֡�Lbo�������
������Щ����������õ��˻��㲻���Ľ�����û���Ҳ���Ժ�����“import taichi as ti”�ˣ��������¿�ͷ��99�д���һ�����ع�ͷ������������“Taichi��װ��Python”����������������ڱġ�Lbo�������
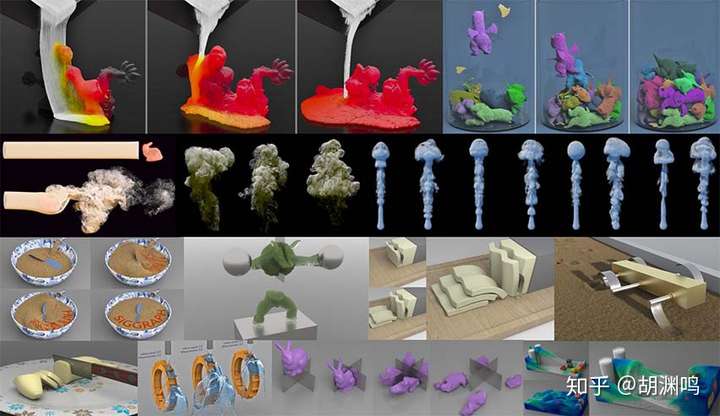
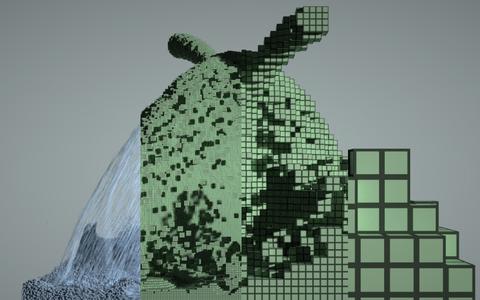
Taichi����ժҪ��(SIGGRAPH Asia 2019) ��ά�������ͨ�����пռ�ϡ���ԡ�Ϊ�������������ʣ������ͼ��ѧ���������˲㼶����ϡ�����ݽṹ����SPGrid��VDB�Ͱ˲����ȡ����ǣ����������ڸ����ԺͶ������������Ӧ����Щ���������ݽṹ�кܶ���ս���������Taichi��һ���µ�����ϡ�裩���ݵı�����ԣ�����˿ռ�ϡ�����ݽṹ�Ŀ�����ʹ�óɱ�������Taichiʵ�����㷨�����ݽṹ�Ľ��ʹ���߿��Կ��ٳ��Բ�ͬ���ݽṹ�������ض��������ϵ�ṹ���ҵ��������ݽṹ������ǰ���ṩ���û����õĽӿڣ�ʹ���û������Է��ʳ������ݽṹ�ķ�ʽ����ϡ�����ݽṹ���������˴���ɶ��Ժ���������Taichi������ʹ�ö����ݽṹ��������±�������Ż�����ľֲ��ԣ��Ƴ��������ݽṹ�������Լ������Զ��ڴ�����Ͳ��л�������������x86_64��CUDA��ϵ�ṹ�ϣ�ֻ��Ҫ1/10�Ĵ��룬Taichi������ܱ��ֶ��Ż���ϡ�����������4.55�������Գ���������ʵ㷨������Ԫģ�⡢���������ɷ�����⣬��ʵ����Ⱦ����3Dϡ�����������ȡ���Ŀ��ҳ�ʹ��룺https://github.com/yuanming-hu/taichiLbo�������